Řízení Kinetixu 5100 přes Micro820® metodou explicit messaging
 Servopohon Kinetix 5100 může být ovládán pomocí řídicích systémů Micro800TM v kombinaci se softwarem Connected Components Workbench (dále CCW). Tento článek se zabývá možností řízení servopohonu kontrolérem přes ethernetové rozhraní. Konkrétně s modely Micro820®, Micro850® a Micro870® můžeme prostřednictvím ethernetové funkce Class 3 explicit messaging ovládat Kinetix5100 změnami proměnných přímo v CCW na PC, nebo využít možnost rozšířit konfiguraci například o HMI PanelView800 a ovládat tak servopohon přímo na uživatelském panelu. Druhou možností, jak řídit servopohon prostřednictvím kontrolérů z řady Micro800TM je s využitím funkce PTO (pulse train output). Tento způsob bude představen v příštím článku.
Servopohon Kinetix 5100 může být ovládán pomocí řídicích systémů Micro800TM v kombinaci se softwarem Connected Components Workbench (dále CCW). Tento článek se zabývá možností řízení servopohonu kontrolérem přes ethernetové rozhraní. Konkrétně s modely Micro820®, Micro850® a Micro870® můžeme prostřednictvím ethernetové funkce Class 3 explicit messaging ovládat Kinetix5100 změnami proměnných přímo v CCW na PC, nebo využít možnost rozšířit konfiguraci například o HMI PanelView800 a ovládat tak servopohon přímo na uživatelském panelu. Druhou možností, jak řídit servopohon prostřednictvím kontrolérů z řady Micro800TM je s využitím funkce PTO (pulse train output). Tento způsob bude představen v příštím článku.
Samotné sestavení konfigurace pro metodu explicit messaging není nikterak složité. V prvním kroku je potřeba nakonfigurovat IP adresy kontroléru a servopohonu, aby zařízení byly navzájem viditelné a propojené. V programu CCW v pár jednoduchých krocích vytvoříme nový projekt s řídicím systémem, který máme k dispozici. Kinetix 5100 nelze přidat do projektu jako samotné zařízení, využijeme ale jednoho z předdefinovaných uživatelských funkčních bloků (UDFB), který umožňuje obousměrnou komunikaci a tok příkazových i statusových dat právě pro Kinetix 5100.
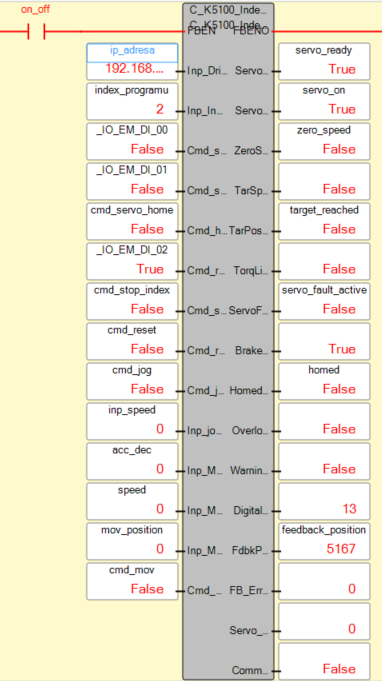
Podobu UDFB můžete vidět na obrázku vpravo. Je patrné, že servopohon byl v tomto případě v činném stavu, neboť výstupní proměnná servo_on měla hodnotu True (1) a proměnná zero_speed hodnotu False (0). Změnou vstupních proměnných v levém sloupci se mění hodnoty na výstupu. Můžeme tedy měnit rychlost otáčení, směr otáčení, pozici, na které se má servopohon zastavit, případně se vrátit o určitý počet zpět a vrátit se na svou defaultní polohu. Všechny tyto proměnné můžeme měnit v reálném čase bez potřeby změny programu a jeho opětovného nahrání do řídicího systému.
Odkazy:
UDFB Kinetix5100_Micro800 – odkaz na stažení UDFB pro řízení Kinetix5100